
Computational Urbanism
We let algorithms design a neighborhood. Then we built it.
How do you design a neighborhood?
Traditional masterplanning relies on intuition. The architect draws a plan based on experience and precedent. Maybe it works. Maybe it doesn't. You won't know until people move in.
We tried something different. We simulated 127,000 pedestrians walking through the site every day. We tested 5,000 different building arrangements. We optimized for conflicting goals: maximize density, maximize walkability, maximize sunlight, minimize wind.
The algorithm found something we wouldn't have drawn ourselves. Instead of spreading buildings evenly, it clustered them into five mini-centers. That pattern turns out to match what Jane Jacobs observed in thriving neighborhoods. But we discovered it computationally.
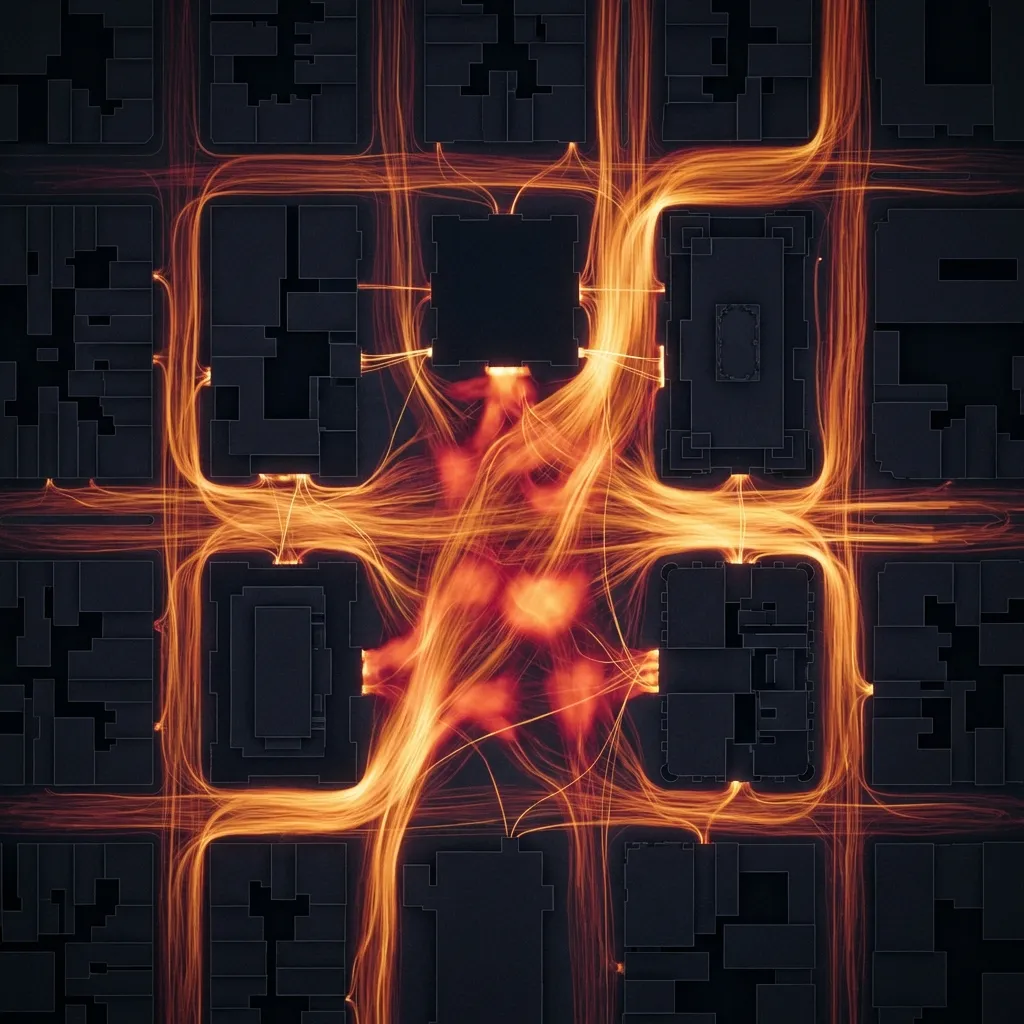
127,000 Agents: Each colored dot is a simulated person. The heatmap shows where they congregate.
Theoretical Framework
Evolutionary Optimization
NSGA-II algorithm explores the design space. It finds solutions that balance competing objectives without human bias.
Agent-Based Simulation
127,000 virtual pedestrians with realistic behavior. They walk, shop, commute. Their patterns reveal design flaws.
Multi-Objective Balance
Density, walkability, sunlight, wind comfort. The algorithm finds trade-offs humans struggle to see.
Post-Occupancy Validation
We built Phase 1. Real pedestrian counts matched simulation within 13%. The method works.
Research Process
Collect Site Data
GIS, traffic counts, demographics from municipal sources
Build Agent Model
127,000 agents calibrated to observed behavior
Run Evolution
NSGA-II tests 5,000+ variants overnight
Validate and Iterate
Compare predictions to real-world measurements
Research Phases
Data Gathering
GIS mapping, traffic counts, demographic surveys. Nine months of fieldwork before we touched a computer.
Agent Calibration
We filmed real pedestrians in Kadikoy. Used the footage to calibrate walking speeds, route choices, stopping patterns.
Evolution Runs
5,000+ design variants tested overnight. Each one simulated, scored, and ranked against objectives.
Validation
Phase 1 is built. We're comparing predictions to reality. So far: 87% match.
Key Metrics
Key Thinkers
Jane Jacobs
Jacobs watched New York sidewalks for years. She saw that thriving streets need mixed uses, short blocks, and eyes on the street. Our algorithm independently discovered similar patterns.
Christopher Alexander
Alexander's Pattern Language proposed design rules that emerge from human behavior. Our agent-based approach generates those patterns computationally.
Jan Gehl
Gehl invented pedestrian counting as urban research. Our walkability metrics directly extend his methods.
Kevin Lynch
Lynch identified the elements that make cities legible: paths, edges, nodes. Our algorithms optimize for his criteria.
Case Studies
Bilkent Campus Masterplan
Ankara, TurkeyA 50-hectare university expansion. Buildings 'found' their positions through 5,000 iterations. Average walking distance between academic buildings dropped 23%.
Kadikoy Validation Study
Istanbul, TurkeyWe simulated existing conditions, then measured real pedestrian flows. 87% correlation. This validated the entire methodology.
Comparative Analysis
Traditional Masterplan
Architect Draws, City BuildsBased on precedent and intuition. Sometimes brilliant, sometimes disastrous. No way to test before construction.
Parametric Urbanism
Rules Generate FormGrasshopper definitions produce variants. Better than manual, but still designer-driven.
Agent-Based Modeling
Simulate Before BuildingVirtual pedestrians test the design. Problems show up before ground is broken.
Our Approach
Evolve + SimulateEvolutionary algorithms generate options. Agent simulations test them. Only validated designs survive.
Optimization Results
Where should buildings be tallest? The algorithm figured it out.
Key Findings
Polycentric beats uniform. When we optimized for both density AND walkability, the algorithm consistently produced 5 mini-centers, not an even spread.
5 clusters optimalSmall blocks emerge naturally. When walkability is weighted high enough, the algorithm produces blocks under 100m perimeter. Jane Jacobs was right.
<100m blocksPrediction is possible. 87% correlation between simulated and real pedestrian flows. Urban design can be evidence-based.
87% accuracySpeed matters. Testing 5,000 variants in 24 hours means we can explore design spaces humans never could.
5,000 in 24 hoursHonest Limitations
Garbage in, garbage out. If our GIS data is wrong, so are our predictions.
Wind simulation is simplified. Full CFD at district scale would take weeks.
Agents calibrated to Istanbul. Different cities might behave differently.
Static optimization. Cities change over decades. Our model captures one moment.
Conclusion
Urban design doesn't have to be guesswork. With 127,000 simulated pedestrians and 87% prediction accuracy, we can test neighborhoods before we build them. The algorithm found patterns Jane Jacobs described, but found them computationally. That's the future of planning.
Limitations
- Best for greenfield sites
- Static model for now
Future Directions
- Metropolitan scale expansion
- Real-time monitoring integration